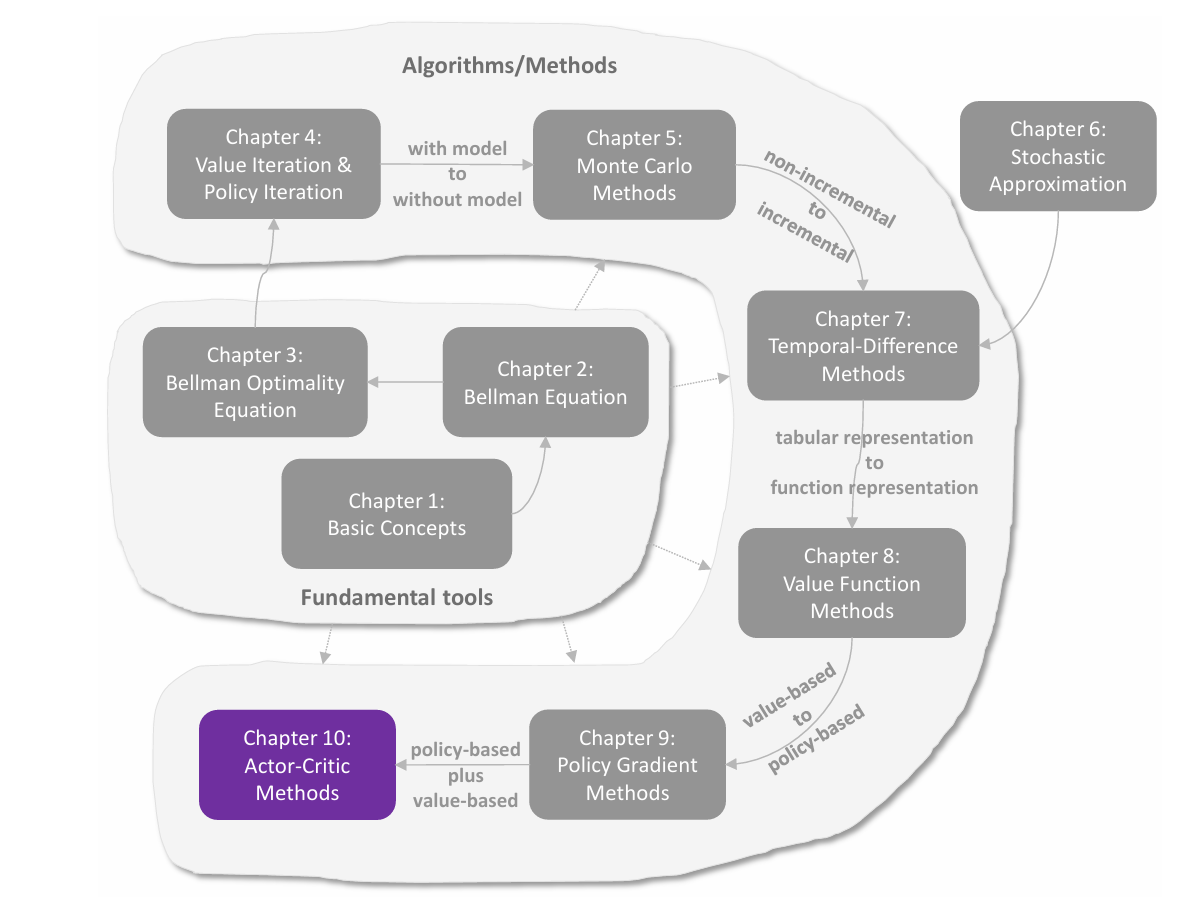
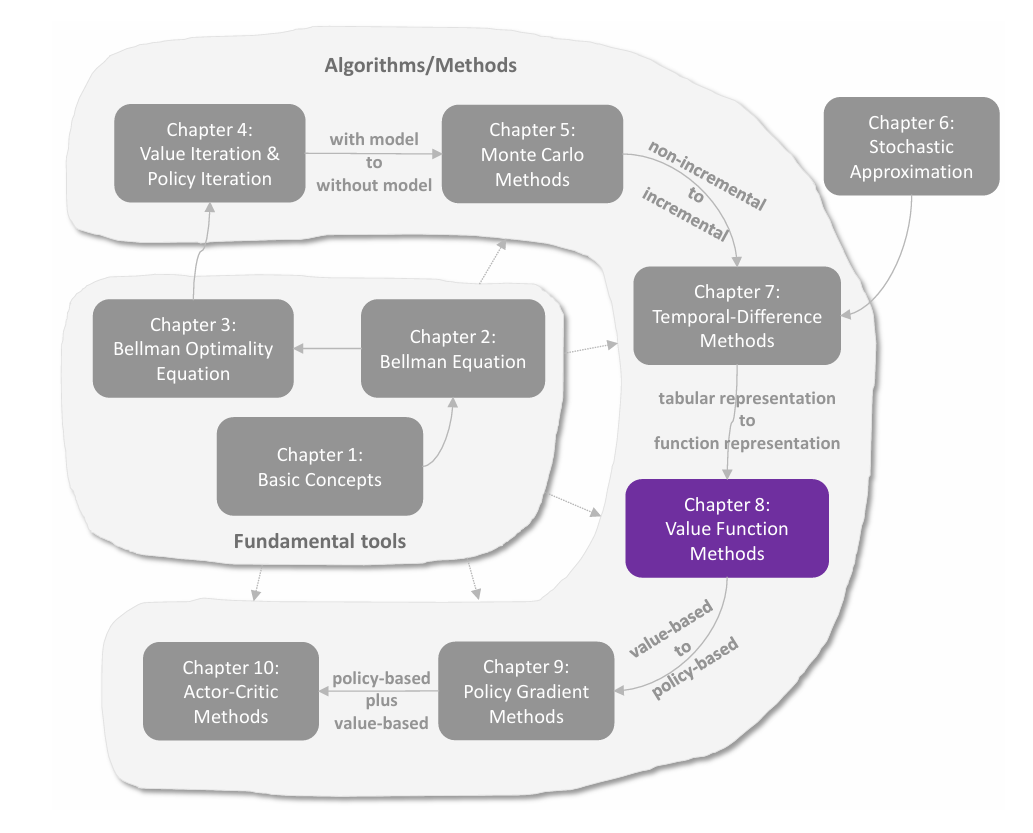
C4 蒙特卡洛方法
蒙特卡洛法
蒙特卡洛法(Monte Carlo method,MC)是一类通过随机采样来近似求解数值问题的计算方法。其核心思想是:利用大量**独立同分布(independently identically distribution,i.i.d.)**的随机样本,通过统计量(如均值、频率)来估计原本难以直接计算的数学量(如积分、期望、最优化解等)。
这里主要讨论 MC 方法在估计期望的应用,因为估计一个 state value 或 action value 的本质就是期望估计问题。
考虑一个随机变量 ,其所有可能的取值集合为 。若要估计 的均值(期望),可以采用两种方法:
-
基于模型的方法(model-based):这里的模型指随机变量 的分布。若 的分布已知,可以直接求出 的期望
其中,若 是离散型随机变量, 为概率分布;若 是连续型随机变量, 为概率密度函数。
-
无模型的方法(model-free):若随机变量 的分布未知,假设对 的若干次采样得到的样本集合为 ,则 的期望 可以被样本近似估计:
根据大数定律,当 时,有 。
通过样本均值来估计期望,这就是蒙特卡洛法,是一个 model-free 的方法。
大数定律:
对于随机变量 ,假设 是 i.i.d. 的样本。记 为样本均值,则有
这说明 是对随机变量 的无偏估计,且当 时方差趋于 (说明 依概率收敛到 )。
入门:MC Basic
MC Basic 方法是将 MC 方法在 policy iteration 中最简单也是最核心的一个应用。
policy iteration 从 model-based 到 model-free
回顾一下 policy iteration,目的是求解 BOE,其迭代过程分为两步,分别是 policy evaluation 和 policy improvement。前者用于计算当前策略下的 state values,由此得到 action values,后者利用贪婪策略选取 action value 最大的动作。因此核心在于计算 action values,也即,每个状态-动作对 的回报的期望。其计算方法也分为两种:
-
基于模型的方法(model-based):这个方法根据 action value 的贝尔曼公式,也是 policy iteration 中采用的方法。首先求出策略 下的 state values ,然后根据公式
可以计算出所有的 action values。这个方法依赖于已知模型的参数 ,因此是 model-based。
-
无模型的方法(model-free):根据 action value 的定义:
也就是状态-动作对 获得的回报的期望,因此可以利用 MC 方法去估计期望的值:从 出发,遵循策略 可以采样得到一系列 episodes。假设有 个 episodes,第 个 episode 的回报为 ,则 可以被近似估计:
由大数定律知,当采样的 episodes 数量 足够大时,样本的均值估计会非常接近于真实的 。
将上述估计的方法应用到 policy iteration 的 action values 计算中,就得到了 MC Basic 方法。
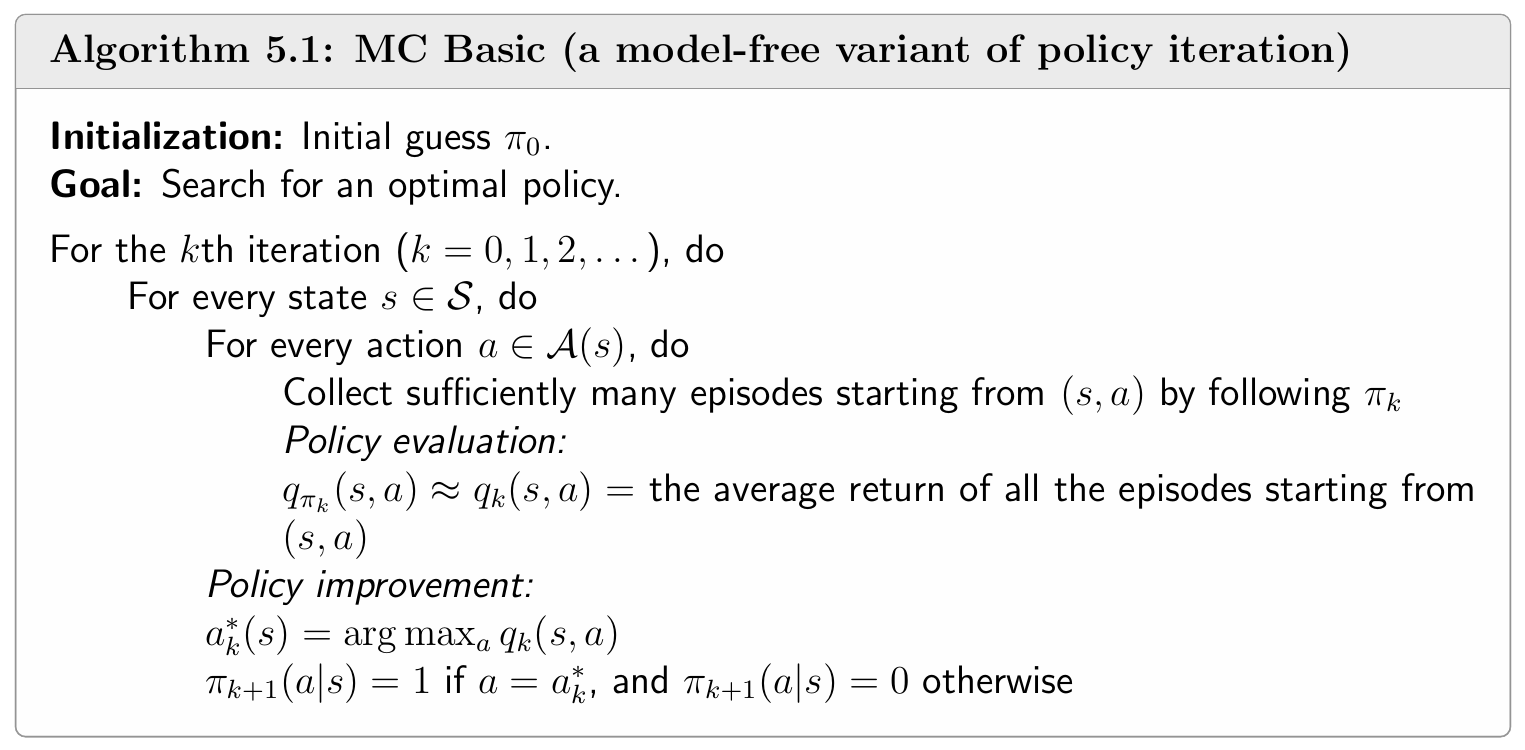
MC Basic
将 MC 方法应用到 policy iteration 的 policy evaluation 计算中,便得到 MC Basic 方法。算法的其余步骤与 policy iteration 一样:初始化任意策略 ,每轮迭代有两步,分别为 policy evaluation 和 policy improvement。
policy evaluation
对于所有的状态-动作对 ,遵循策略 ,充分采样 episodes 并利用其回报的均值 近似 。
注意,这里直接估计 而不再估计 。否则根据 state values 求 action values 还是需要基于模型。
尽管估计的值 不精确,但是该算法依然可以收敛到最优策略。这就是广义策略迭代,在求解 BOE 的方法 truncated iteration 中也曾窥见。
policy improvement
与 policy iteration 一样使用贪婪策略,每个状态 下选取 最大的动作 。
伪代码
关于采样
这里通过一个例子来说明采样的 **episode length(回合长度)**对结果的影响,以及 **sparse reward(稀疏奖励)**对采样的影响。reward 设置为 ,折扣回报 。
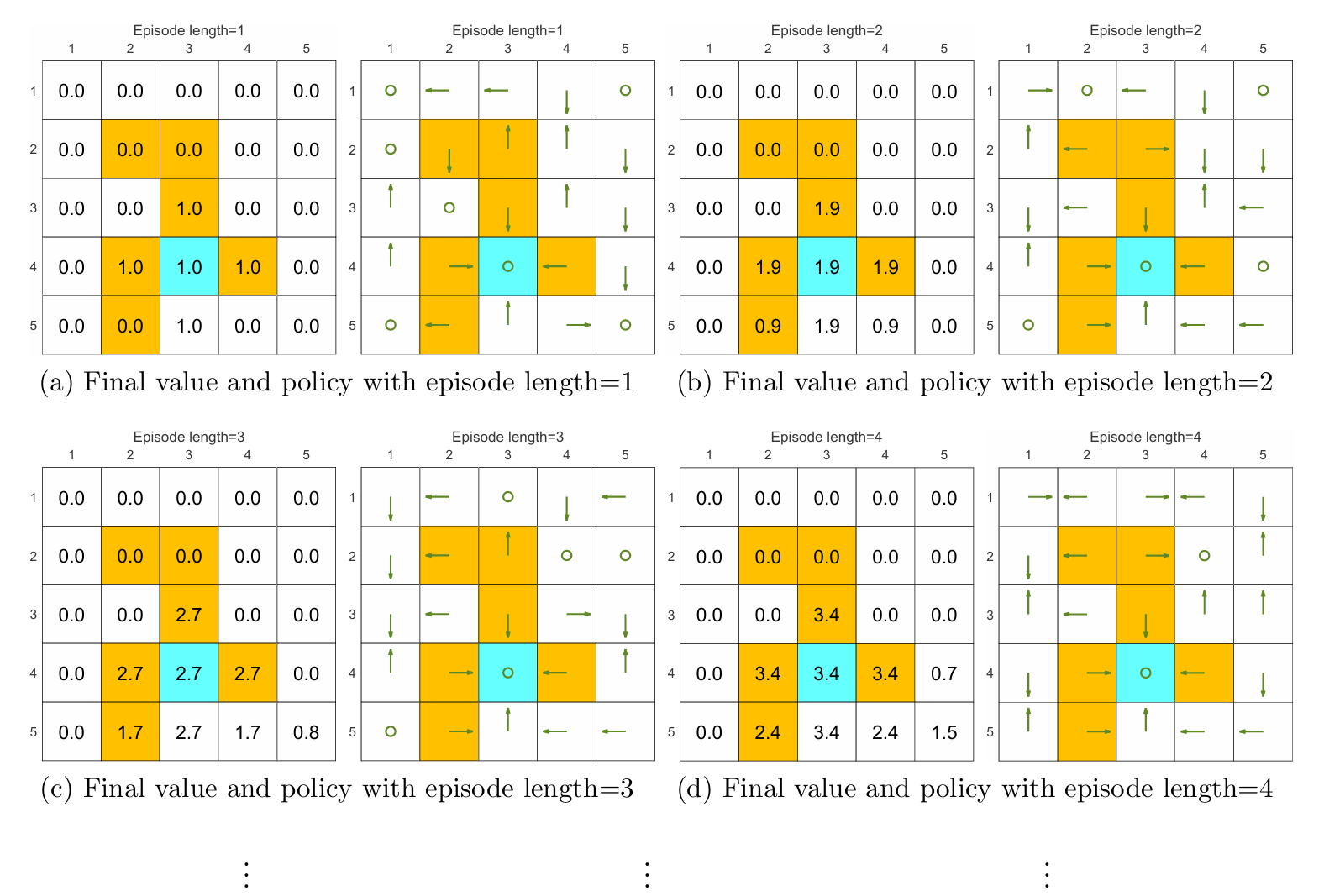
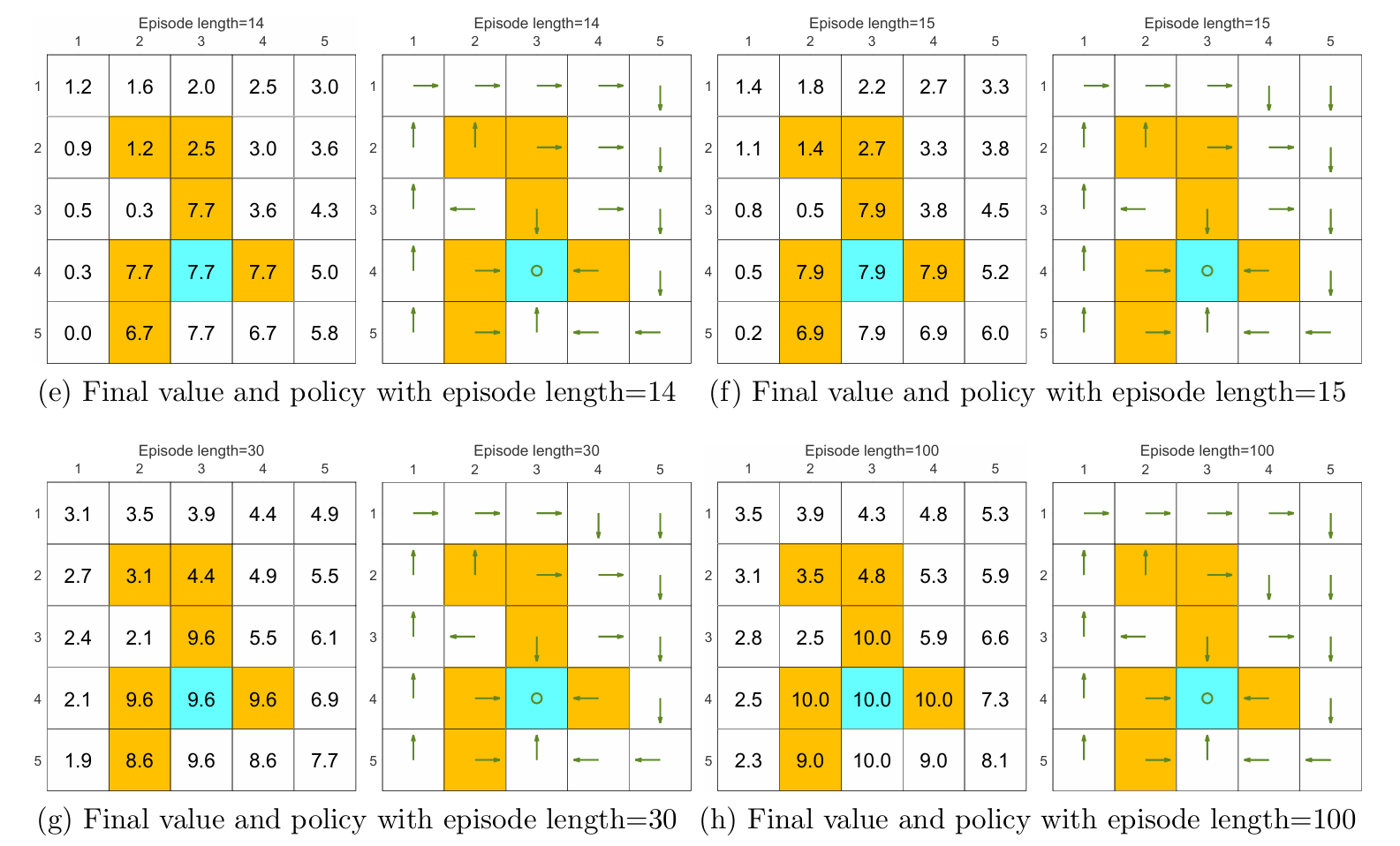
episode length
由上图可以发现采样的 episode length 会极大地影响最终得到的最优策略。
由 (a)-(d) 可见,当采样的 episode 长度过短时,policy 和 state values 都不是最优的;在长度为 的极端情况下,只有与终点相邻的状态的 state value 非 ,而其它状态全为 ,这是因为采样的每一个 episode 的长度太短,以至于它们无法抵达终点,也就无法获得正奖励。但随着采样的 episode 越来越长,policy 和 state values 逐渐接近最优。
进一步观察可以发现,随着 episode 越来越长,离终点(正奖励)更近的状态会更早地获得非 的 state value。这很好理解,因为从一个状态出发,必须至少走一定的步数才能到达终点,获得正奖励,而 episode 的长度至少需要这么多步数,否则 state value 只能为 ,因此离终点更近的状态会更早地能够到达终点,拥有非 的 state value。
此外,episode 只需充分长(使所有状态都能够到达终点)而无需很长很长,例如 (g) 中 episode 长度为 时便能够获得最优策略,尽管估计的 state values 不是最优的。
sparse reward
在强化学习中,**sparse reward(稀疏奖励)**是一个常见但棘手的问题。简单来说,稀疏奖励是指 **agent(智能体)**在执行一系列动作以完成任务时,只在完成整个任务或达到特定阶段后才获得奖励信号。这种情况下,agent 很难从环境中获取有效的反馈,特别是在状态空间非常大时,导致学习过程缓慢甚至失败。
例如上述的 grid world 例子,如果状态空间非常大(例如网格尺寸变为 ),会需要非常长的 episode length 才能进行合理的采样,大大降低学习效率。
一个简单的解决方法是设计 nonsparse rewards(非稀疏奖励)。例如对于上述的 grid world,可以重新设计一个 reward 设置,使得 agent 在终点附近的状态时能够获得正奖励;这些状态在终点附近形成一个 “attractive field”,从而便于 agent 更快、更容易地找到终点。
MC Exploring Starts
MC Basic 方法非常简单,但实际上由于采样的效率太低(对于每一个状态-动作对 都需要充分采样)而不能使用。因此,基于 MC 方法的强化学习很重要的一个方面就是如何提高利用样本的效率。
MC Exploring Starts 方法从样本利用和策略更新两个方面大幅提升效率。
样本利用
考虑这样一个遵循策略 采样的 episode:
其中下标表示状态和动作的索引而非时间步。在 episode 中,每一次状态-动作对的出现称作对其的一次 visit。如果存在状态-动作对 的 visit,那么就可以用 后面的序列部分来估计 的 return。
对 visit 的利用有不同的策略:
-
initial visit:一个 episode 只利用最开始的状态-动作对。例如上述的 episode 只利用状态-动作对 的 visit,即只用来估计 的 return,而其它所有状态-动作对的 visit 都不使用。不难发现,MC Basic 用的就是这种方式。
-
initial visit 对状态-动作对的 visit 的利用率很低,事实上 episode 中的所有 visit 都能利用起来去估计相应状态-动作对的 return。我们可以将采样得到的一个原始的 episode 分解为不同起点的 episode:

因此在原始的 episode 中,每个状态-动作对 的 visit 都可以用它后面的序列部分(视作一个从 出发的 episode)来估计其 return。
由于在一个 episode 中,同一个状态-动作对 可能出现多次,在这种情况下,对 visit 的利用也分为两种:
- first-visit:只利用 的第一次 visit 去估计其 return。例如在上面的原始 episode 中, 先后出现了两次,则只利用以第一个 为起点的 episode 的 return,去估计 的 return。
- every-visit:利用 的所有 visit 去估计其 return。在样本的利用率上,该方法显然是最好的。如果一个 episode 足够长,那么它有可能会访问到所有状态-动作对很多次,此时 every-visit 能够充分地利用这些 visit。
策略更新
MC Basic 每轮迭代中,在估计一个 action value 时,需要先充分采样多个从 出发的 episode,然后用这些 episode 的 return 的均值作为 期望的估计。这种方法的弊端是 agent 必须等所有 episode 的采样结束后才能进行策略的更新。
因此,MC Exploring Starts 的做法是每轮仅采样一条 episode 并用 first-visit 或 every-visit 的方式去更新对每一个 visit 到的 action value 的估计,随后更新策略。尽管这些估计可能非常不准确,但仍然可以让迭代收敛(也就是广义策略迭代)。
伪代码
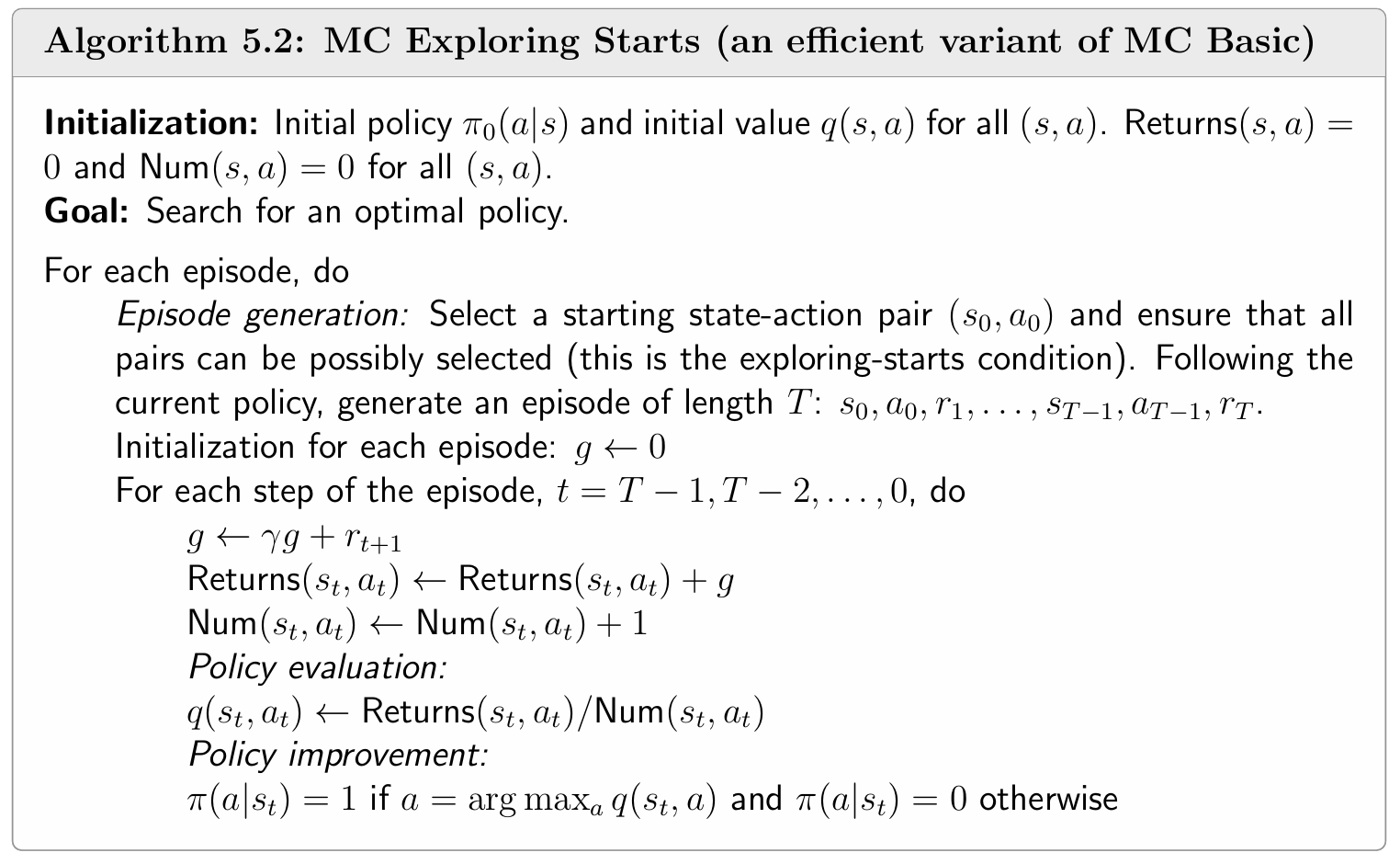
图中的伪代码采用的是 every-visit 的方法。可以注意到,every-visit 的过程是在采样的 episode 中倒序进行的,这实际上是一种技巧,能够减轻计算量。
此外,policy improvement 步骤也可以放在循环外,也就是利用完一个 episode 更新所有的 后再一次性更新策略。
MC Exploring Starts 的弊端
MC Exploring Starts 使用贪婪策略,要求对每一个状态-动作对 作为起点都要采样充分多的 episode,因为只有当每一个 都被访问到足够多次时,才能够保证 action values 足够的精确。这事实上也是"Exploring Starts"命名的由来:通过控制“起始点”来强制“探索”。但是这个条件在很多场景下都难以满足,特别是每次都要与环境进行复杂的物理交互时。因此,产生了 MC -Greedy 方法,通过改变贪婪策略,让生成 episode 的策略 具有更多的探索性质,从而避免需要对 都作为起点采样 episode。
这里之所以强调每一个 都需要作为起点采样足够多次,是因为在无模型强化学习中,如果总是从固定的初始状态开始采样,并且策略是确定性的,那么某些状态-动作对可能永远无法被访问到(类似“永远不了解其他的路”)。为了解决这个探索问题,MC Exploring Starts 采取的理论方案就是:让每个可能的状态-动作对都有非零概率作为一条轨迹的起始点。
MC -Greedy
MC Basic 和 MC Exploring Starts 为了保证每一个状态-动作对 都能被充分采样到,需要对每一个 都作为起点采样充足的 episode,本质原因是它们采用贪婪策略。MC -Greedy 通过利用 **soft policy(软策略)**来实现只需采样一个 episode 就能满足每一个状态-动作对都能被充分采样。
一个策略是 soft 的,当它在任何状态下对任何动作都有概率采取。
当遵循一个 soft 策略去采样一个 episode 时,如果这个 episode 足够的长,那么所有的状态-动作对 都会被访问很多次(有很多次 visit)。
-Greedy
-Greedy 是一种软策略,也是随机策略。它对 greedy action(贪心动作)拥有最高的概率,而对其它动作具有均等的非零概率。
设 ,则 -Greedy 策略定义如下
其中 表示状态 下的动作空间的大小。
greedy action 的概率始终比其它动作的概率高,因为对于任意 都有
可以见得,当 时,就变成了贪婪策略;当 时,所有动作包括 greedy action 的概率全都相等。
MC -Greedy
将 -Greedy 应用到 MC learning 中,只需要将 policy improvement 的 greedy policy 替换为 -greedy policy 即可。
具体而言,MC Basic 和 MC Exploring Starts 的 policy improvement 是在求解方程
其中 表示所有可能的策略构成的集合。上式的解为
其中 。
先将要求解的方程改为
其中 表示在给定 的情况下,所有 -greedy 的策略所构成的集合(显然 )。这种方式能够将之前解得到的 greedy 策略强制转变为 -greedy 策略,现在的解为
其中 。
由此得到的 MC learning 算法称为 MC -Greedy。
当给予充分的采样时,MC -greedy 算法显然也会收敛到最优策略。这是没有任何疑问的,因为其本质也是在求解 BOE。唯一不同之处是策略空间 变为了 ,也就是说最后收敛到的最优策略是在 中的最优策略,显然不是之前确定性的最优策略——贪婪策略。当 足够小时, 中的最优策略会非常接近 中的最优策略。
伪代码
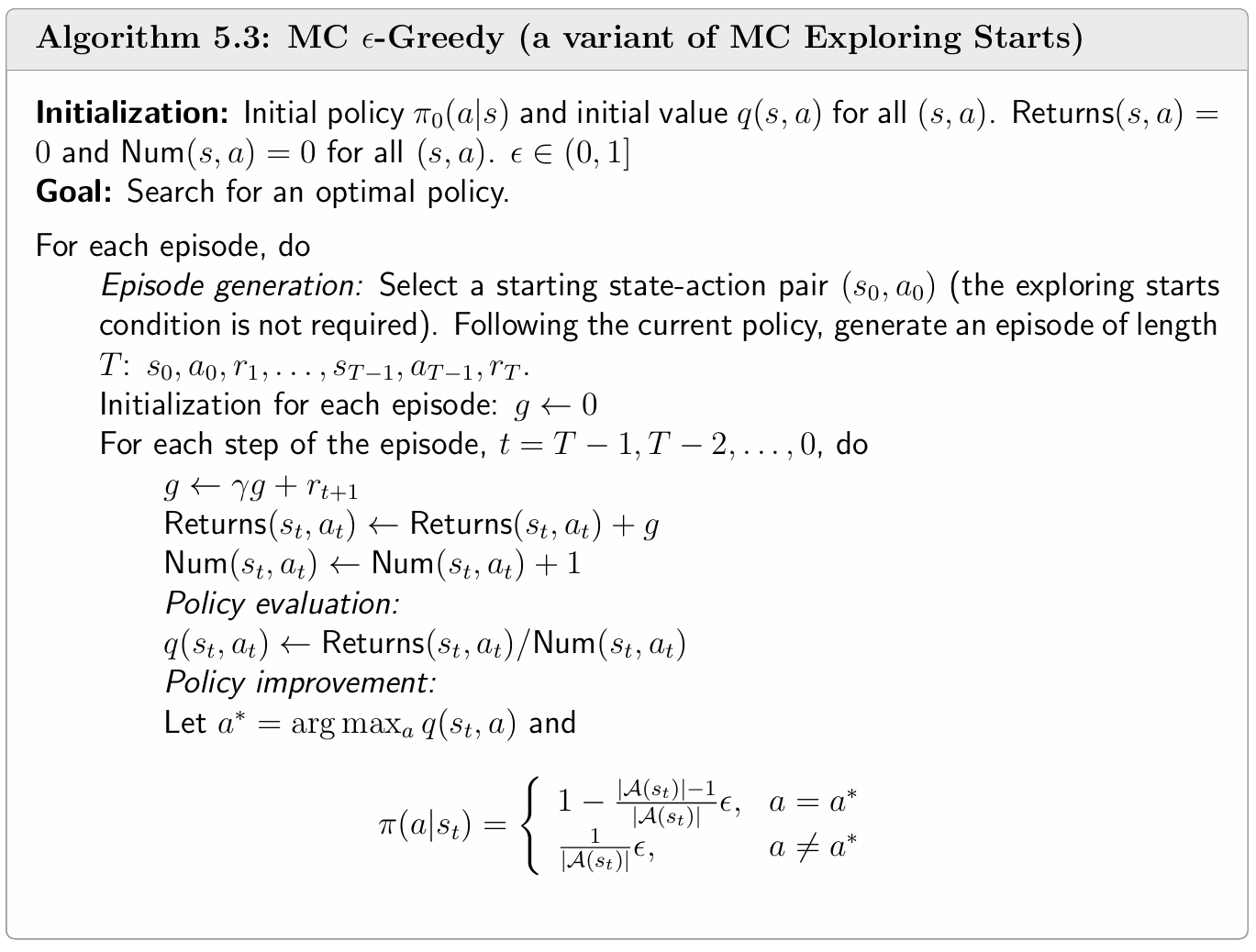
这里采用的仍然是 every-visit 的方式。
的选取
**exploration(探索)**和 exploitation(利用)是在强化学习中的一个基本的权衡:
- exploration 指策略尽可能多地采取不同的 action,从而所有的 action 都能够被访问到并得到较好的估计。
- exploitation 指改进的策略应该采取 action value 最大的 action,也就是 greedy action。这是策略最优性的保证。
但实际上,由于估计 action values 需要足够的采样,而 exploitation 会导致不充足的采样(在每一个 episode 中),因此在 exploitation 的同时需要保证一定的 exploration,尽管会牺牲 exploitation 带来的最优性。
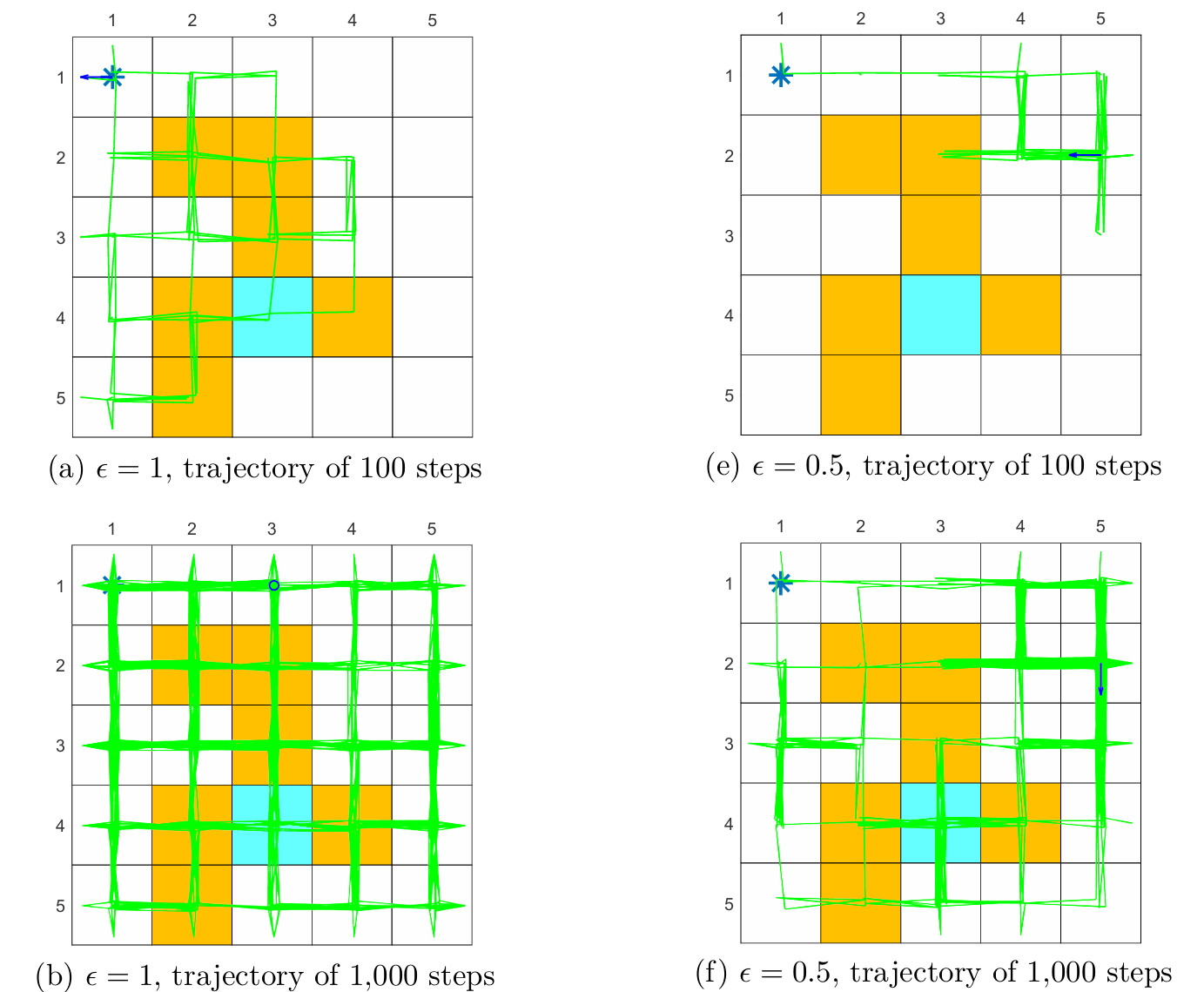
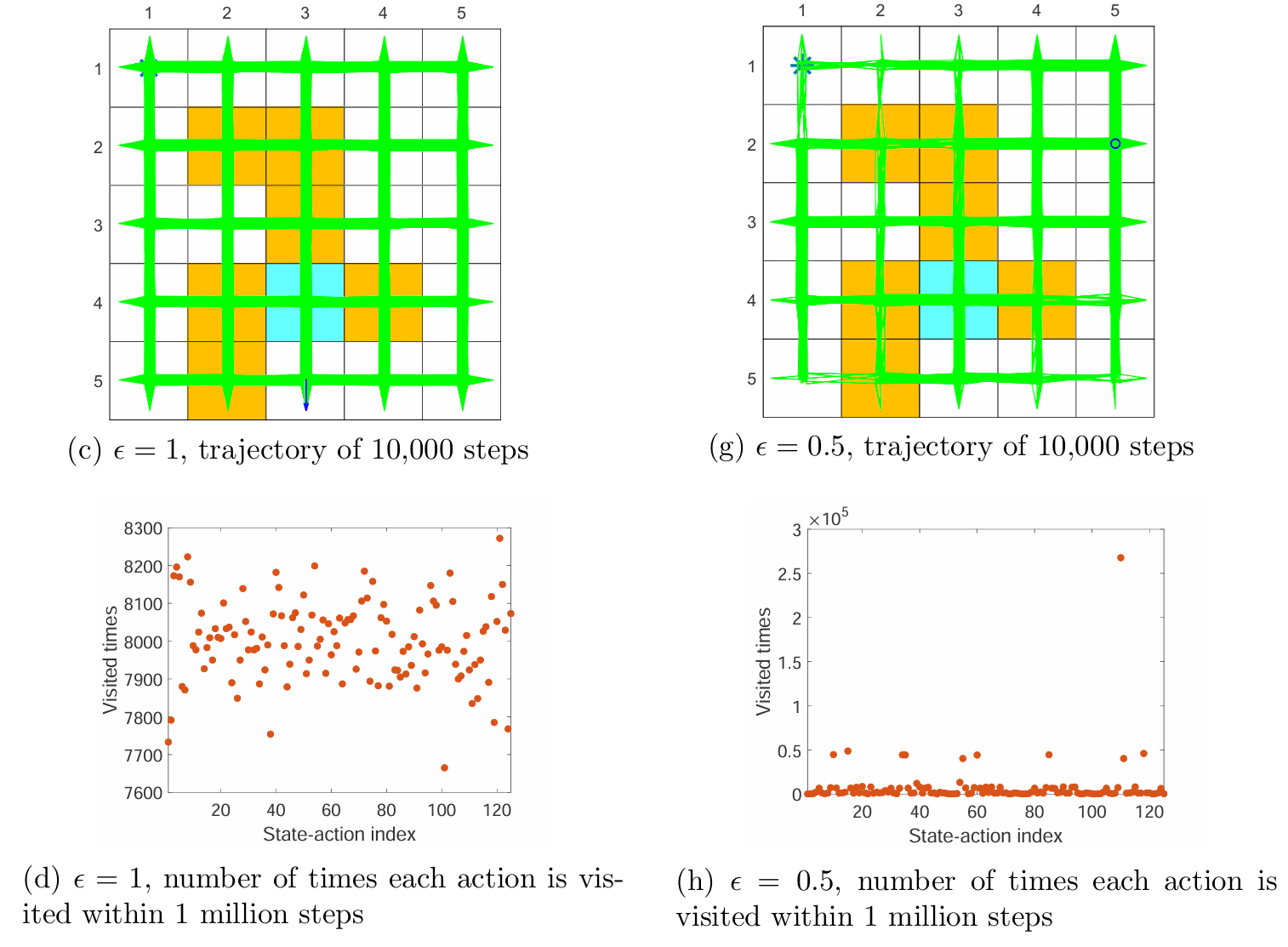
-Greedy 策略实际上就是牺牲了 greedy 策略的最优性,来增强策略的探索性。其对 值的选取就是在平衡 exploitation 和 exploration。通过增大 来增强 exploration,通过减小 来增强 exploitation 和 optimality。
一个比较好的做法是在采样的一开始使用较大的 来尽可能多地访问所有的状态-动作对(exploration),以保证前期对 action values 较精确的估计。随着策略逐渐改进,逐渐减小 来保证 action values 和 optimality(exploitation)。
下面这张图想体现的是,当采样的 episode 足够长时, 时所有状态-动作对被访问到的次数大致是均等的; 时尽管也能够访问到所有的状态-动作对,但是出现了不均等。